

Front End
About the learned Joshi's parsing, exploring
fine-tuning and formalization
Middle End
About the iterative Joshi's optimizations, exploring
intent and isomorphisms
Back End
About the formal Joshi's emissions, exploring
abstraction and ASTs


Phenomenalist
About why the 5-modal Joshi is the only one in his head, exploring
solitude and solipsism

Berkeley: Reprise
In which the graduated Joshi revisits his wayward words, exploring
pretention and purpose
P ≟ NP
About why the quiet Joshi might never find the right words in polytime, exploring
decision and decidability
SELECT * FROM things ORDER BY love LIMIT 5
About that which the opinionated Joshi’s can’t live without, exploring
Symbols and storytime

Again.
In which the constipated Joshi explodes while cooking, exploring
metaphysics and metametaphysics

Dissonance Machine
In which the improvising Joshi takes the scenic route, exploring
FSD and floaters
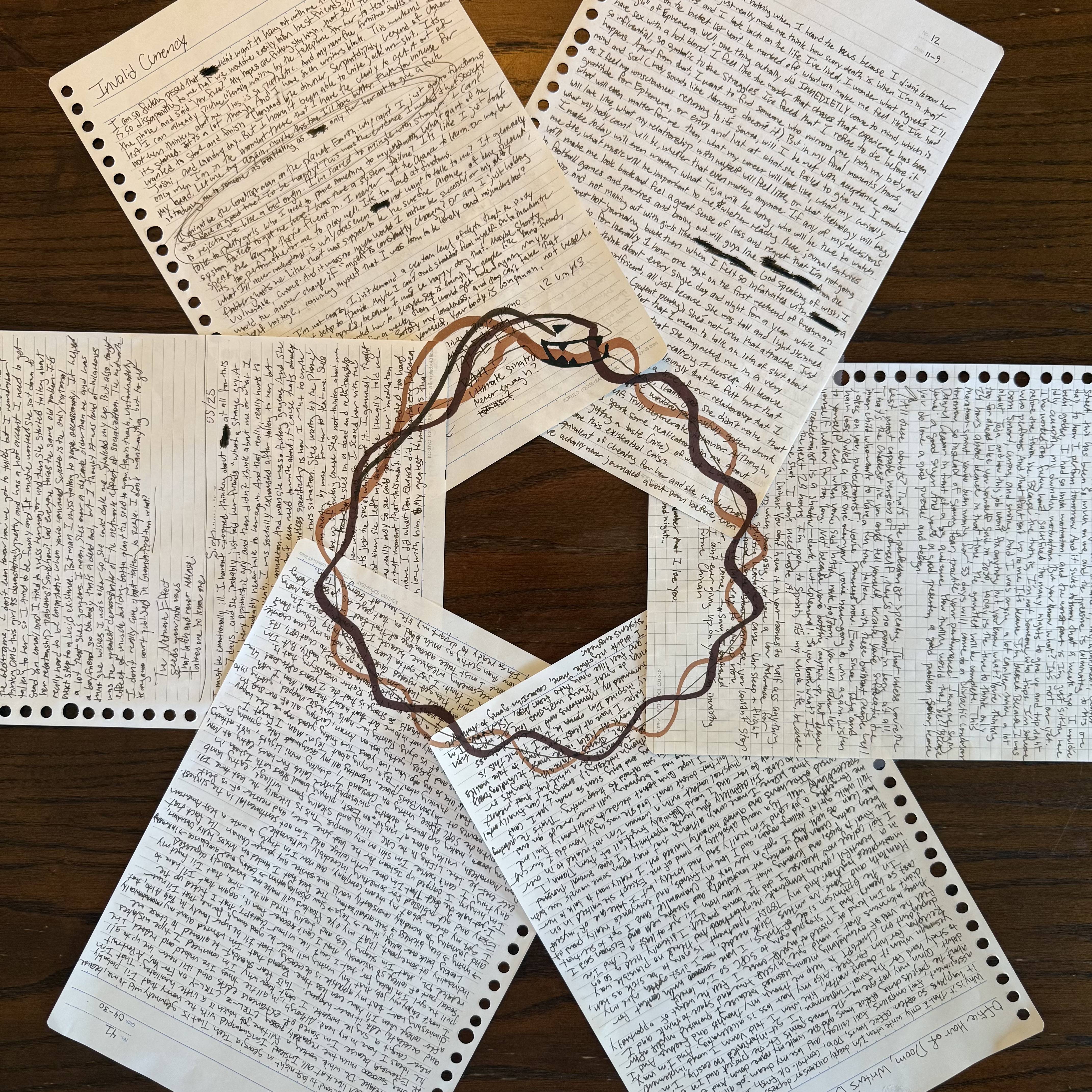
Ouroboros
In which the broken-record Joshi says the same thing over and over and over and
over and over

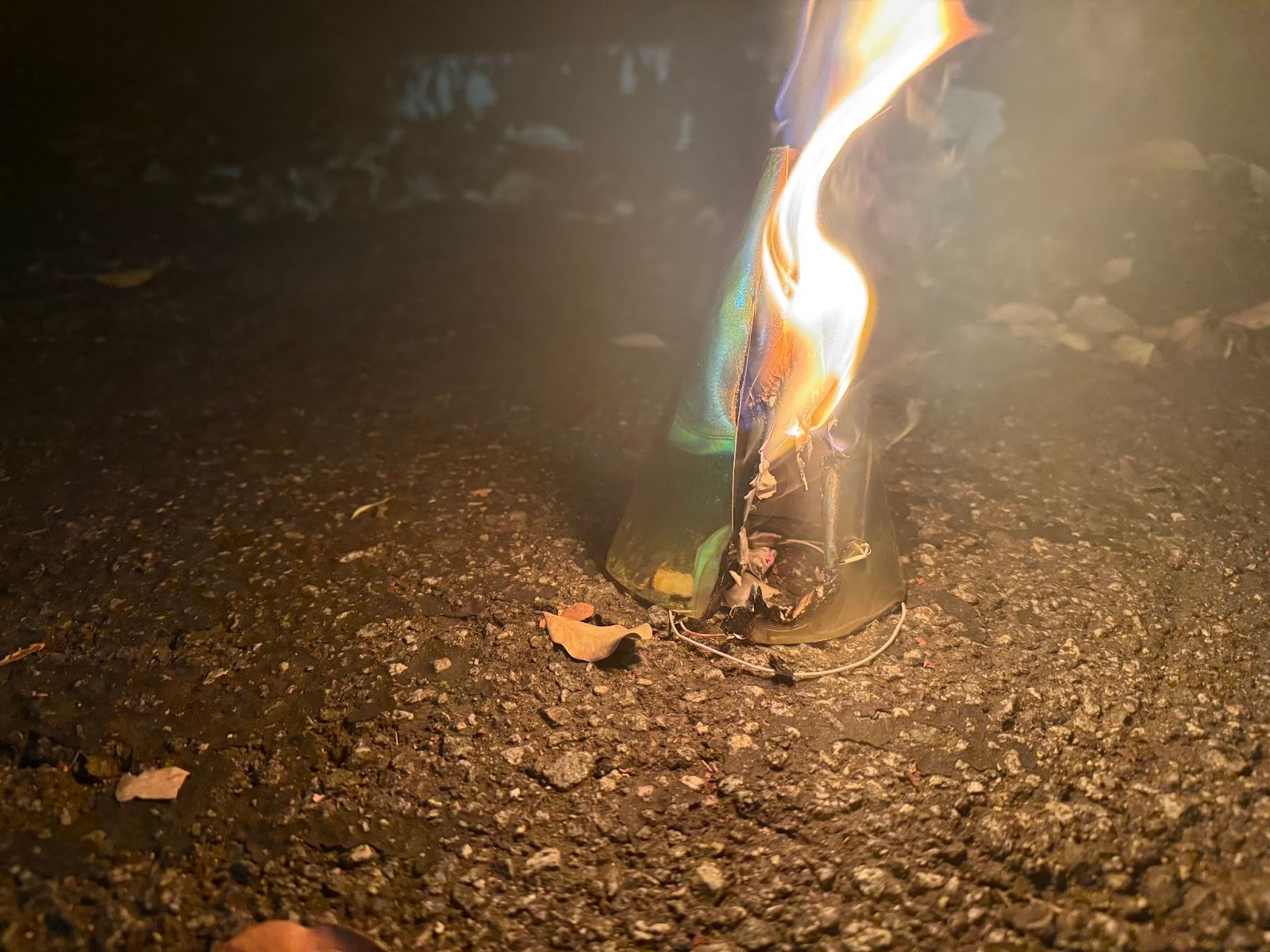
Hawking Radiation
About the ephemeral Joshi’s art-making, exploring
rumination and revelation
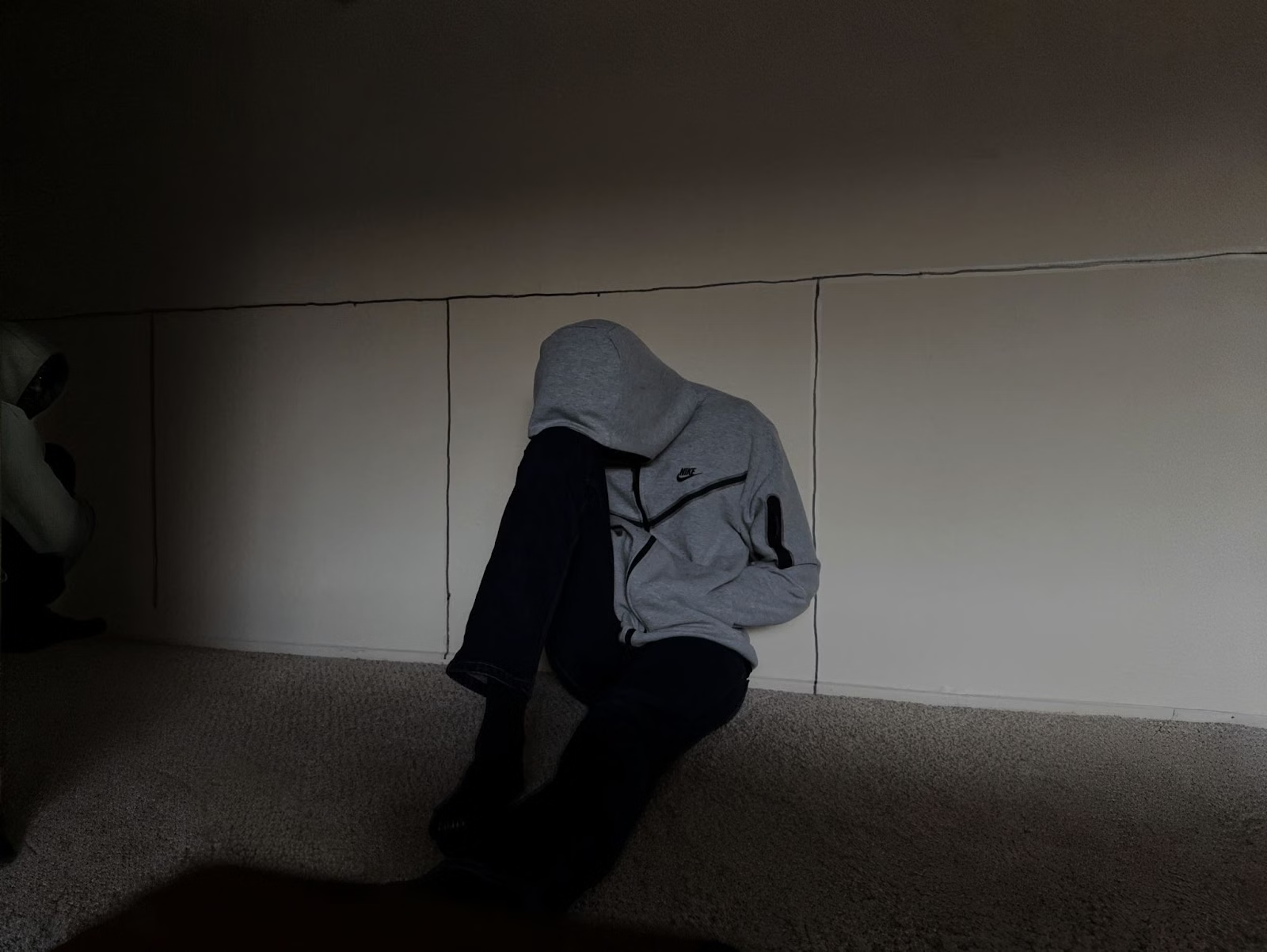
Too Many Boxes
In which the claustrophobic Joshi goes home home, exploring
compartmentalization and confrontation
God’s Eye View
About the non-deterministic Joshi’s infinite branches, exploring
entropy and epistemology
Laundry Day
About why the intergenerational Joshis love folding clothes, exploring
mistakes and multiplicity
Baryogenesis
About the physical Joshi's first phase, exploring
antimatter and asymmetry

fork()
In which the pathetic Joshi takes 4 months to learn a simple lesson, exploring
longing and lament
Two Drifters, Off to See the World
About the tethered Joshi’s race’s Rat Race, exploring
matter and mind

More Sonic Capacitors
Which relates the sonic Joshi’s checkpoints, exploring
commits and catharsis

Shit's Calm
About why the ‘cursed’ Joshi’s problems are actually solvable, exploring
depth and depression

Beauty is Fragile
...

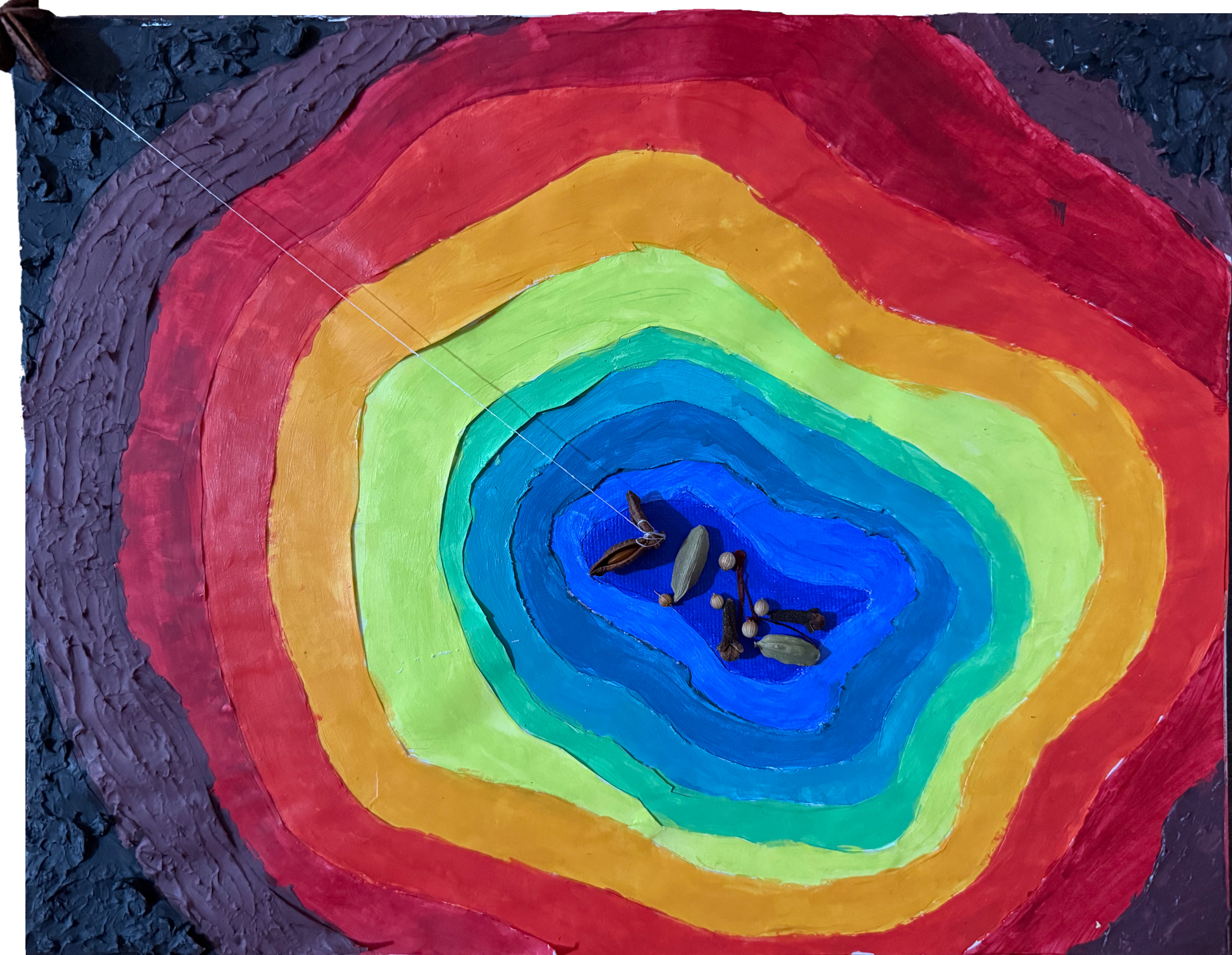
Chinar = Px, P ∈ ℝ^(3×n)
In which the 3+1D Joshi makes biryani, exploring
purpose and projection

Tensor Residence Scheduling
In which the juggling Joshi abuses the NUMA hierarchy with NVLink-C2C, exploring
memory and mechanism

Inconsolatra—Garamond
In which the Markovian Joshi falls in the middle, exploring
routine and residue

Bad Egg
Decoding a 322 millisecond embedding between the lucid Joshi and GPT-12x, exploring
insight and I/O-bounds
std::queue<Being> existence
In which existence[n] addresses his neighbors, exploring
fate and FIFO
Serpentdipity
About the conversation the delusional Joshi had on his birthday, exploring
sincerity and solitude

Thousand-Bite Dinner
In which the bored Joshi almost steps on something, then does, exploring
surplus and scarcity
Echo Chamber of the Living
About the arbitrary Joshi's loss function, exploring
gradients and gravity
𝑀
In which the lucid Joshi dissects free will with 5 sentences, exploring
sets and stochastics

Kangaroo Court
In which the amortal Joshi finally goes to sleep, exploring
salvation and surrender


2020
In which the clumsy Joshi accidentally destroys the spacetime continuum, exploring
gratitude and growth

My Nails Reek of Flesh
About why the culinary Joshi wanted to go vegan for a week, exploring
tastes and tinkering
Poetry is Pointless
About why the cynical Joshi thinks philosophy is just another coping-mechanism, exploring
vulnerability and vindication

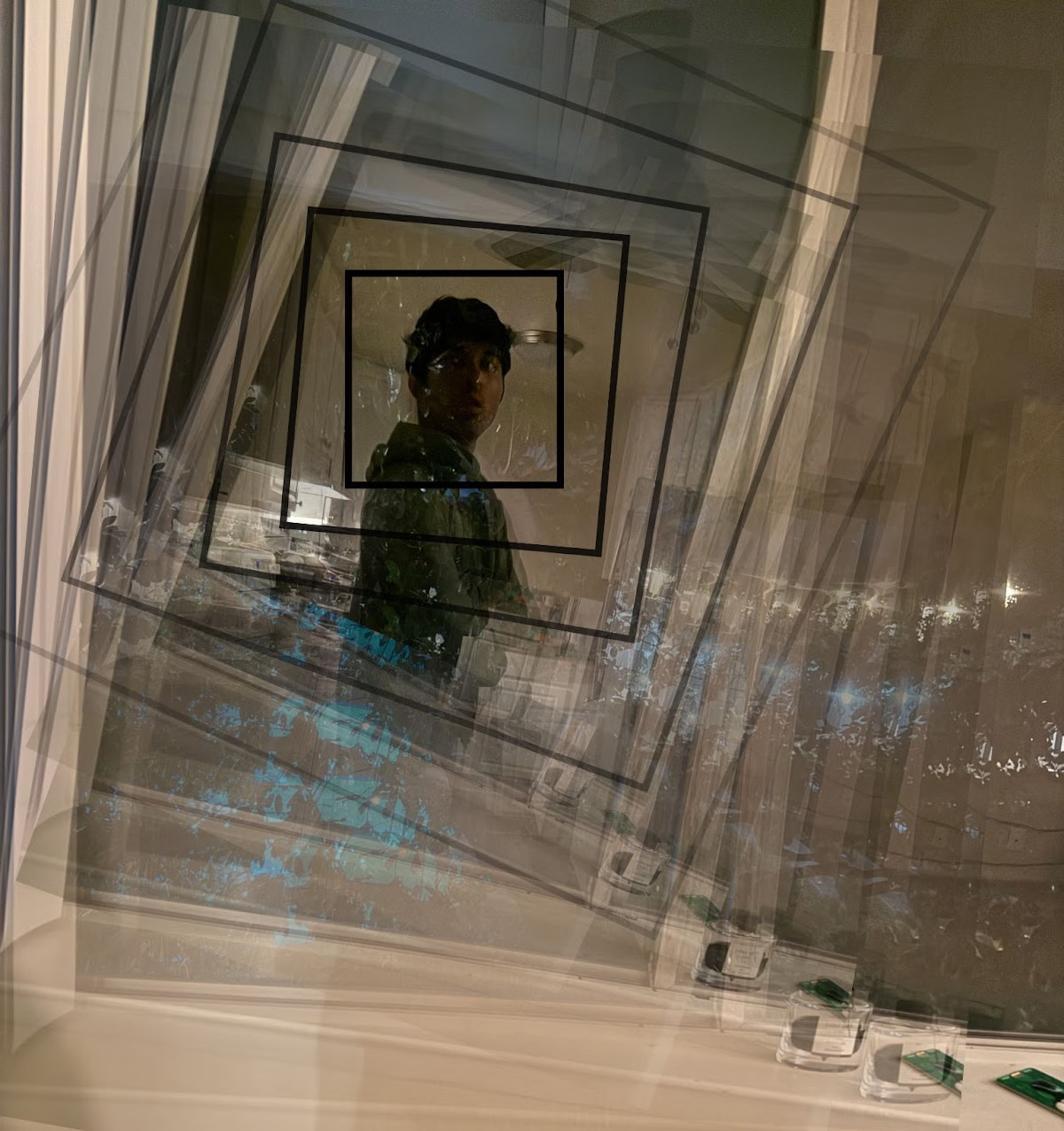
Inception 2
About why the sleeping Joshi savors the mundane, exploring
sights and surreality
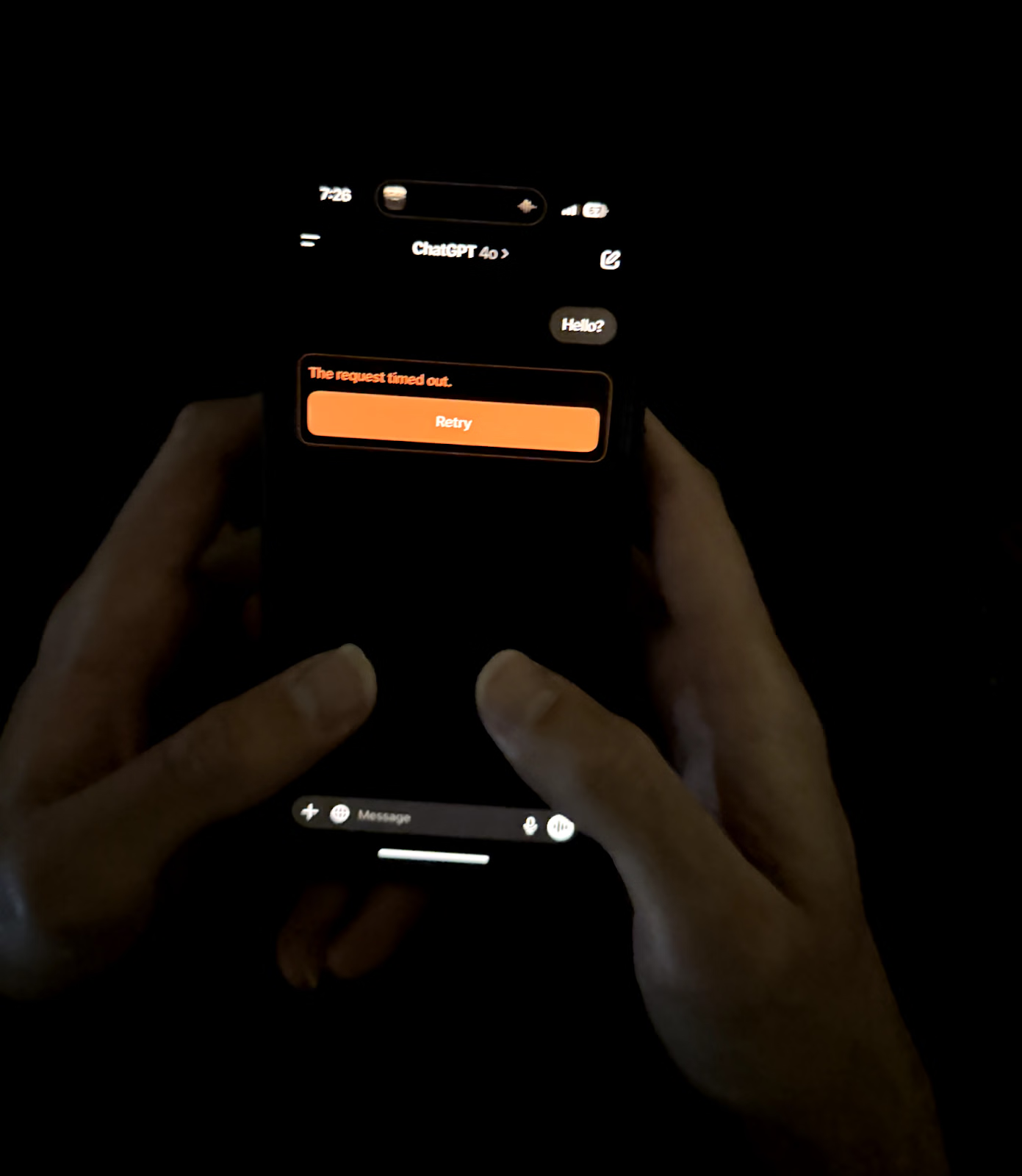
Half Man, Half Machine Learning
In which ChatGPT is always there for the dependent Joshi… until it isn’t, exploring
availability and autonomy

Sonic Capacitors
In which the cathartic Joshi discharges some of his favorite songs, exploring
sounds and sentiments

iPhone 26 Nouveau Ultra+
In which the panpsychist Joshi’s new phone acts a little off, exploring
sentience and singularity

My Cold Fingers Say
Which relates vignettes of the nostalgic Joshi's favorite tactile memories, exploring
touch and thoughtfulness

2030
In which Sir Joshi saves this journey from an anticlimax, exploring
humility and hope

Three(ish) Words
Describing the contradictions of the indescribable Joshi, exploring
expectation and expression
DFS
In which the caffeinated Joshi attends a lecture on space complexity, exploring
wondering and wandering
CTRL-z CTRL-y
In which the mutable Joshi is convinced that something has changed, somewhere, without his knowing, exploring
perfectionism and paranoia

Practicing for Disappointment
Which relates the conversation the sweaty Joshi expects to have on his next date, exploring
anxiety and apocalypse

Masochist Mountain
About why the restless Joshi will never let himself be satisfied, exploring
valor and validation

A Solipsist Language
Relating the amusing musings of the confusing Joshi concerning the nature of nature, exploring
TMs and termination

The Other Side of the Pond
In which the haughty Joshi sees a hottie staring back, exploring
virtue and vanity
Customer Disservice
In which the unstoppable Joshi meets an immovable object, among other legendary events, exploring
motivation and Murphy's law

Severed Finger
In which the disillusioned Joshi silences the noise, exploring
industry and identity

Wandering Elsewhere
About what happened to the young Joshi's first romance after myriad missteps, exploring the timeless themes of
meandering and maturing

Lucid Dreams
About the inconvenient realizations had by the tipsy Joshi after the sixth beer, exploring
begrudging and belonging

Ephemera
About the destroyed coffee cups that made the clingy Joshi let go of the past, exploring
moments and memory

Ballad of the Balance Wheel
In which the nihilist Joshi dissects his beloved wristwatch, exploring
morality and mortality

The Stood-Up Fool
In which a further account is given of the resigned Joshi's first romance after overhearing some gravely unwelcome news, exploring
rejection and resilience

United In Censorship
In which the unmasked Joshi decodes a garbled soliloquy, exploring
avoidance and acceptance

The Great Rat Race
About the contrived and prolonged game of numbers imposed upon the carefree Joshi by none other than the ambitious Joshi, exploring
perfection and purpose

Runaway Train
In which the steadfast Joshi dishonors his post to play ball with friends, exploring
satiety and sacrifice

Captain Obvious
In which final resolution is given of the sappy Joshi's first romance upon revisiting some awfully briny messages, exploring
stagnation and self-actualization

Chinar’s Molarious Mole Jokes
Plus, other equally terrible puns
How to connect to WiFi
Plus, unwinding Linux's network stack
Shell Shock
Plus, a survey of undesigned software
English + sh
Plus, the history of natural language interfaces
̅C̅o̅d̅i̅n̅g
Plus, the Monkey Comparison problem
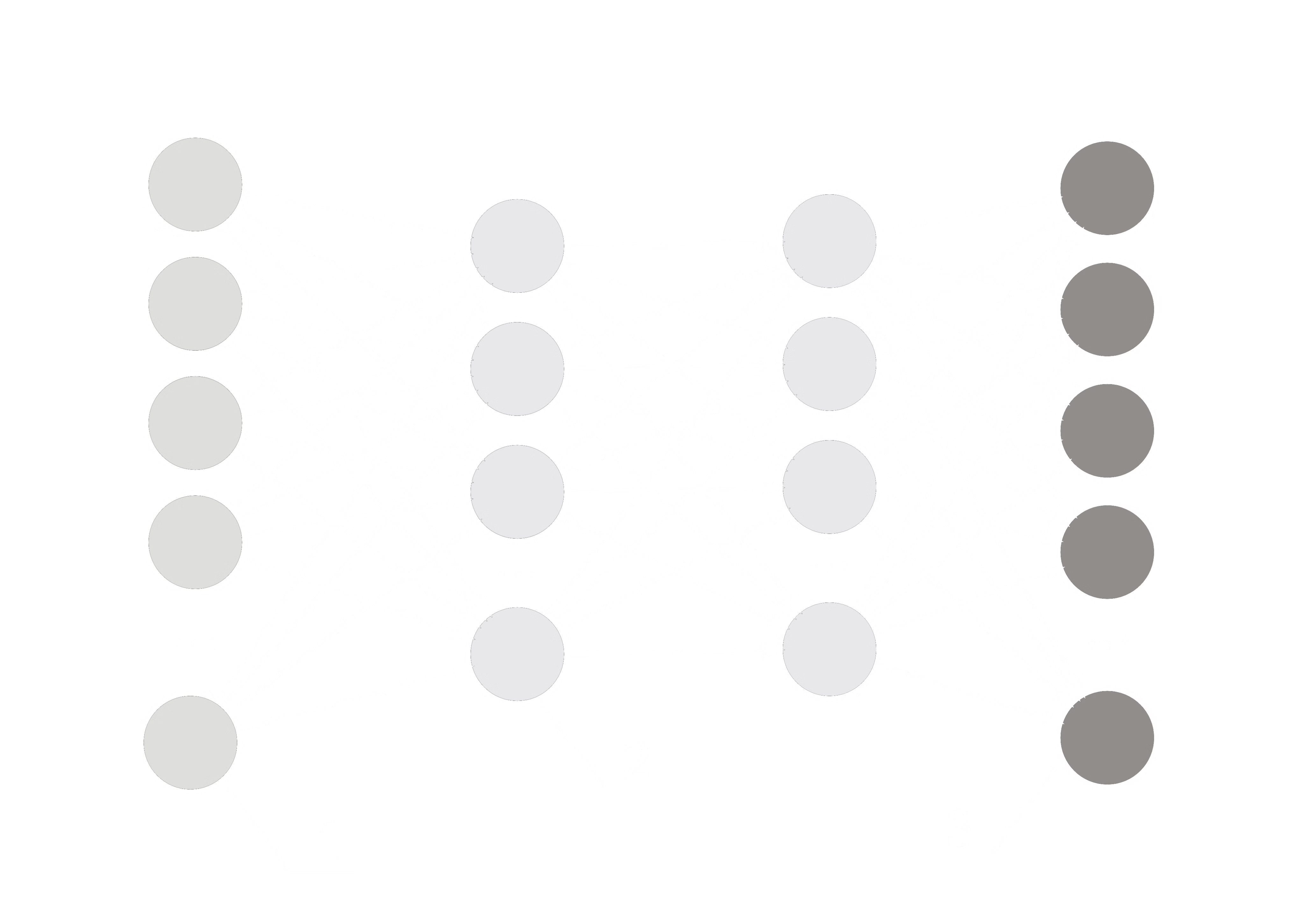
The N in NLP
Plus, a way to unit test LLM prompts through embeddings
VERSION
Plus, sexy libc functions
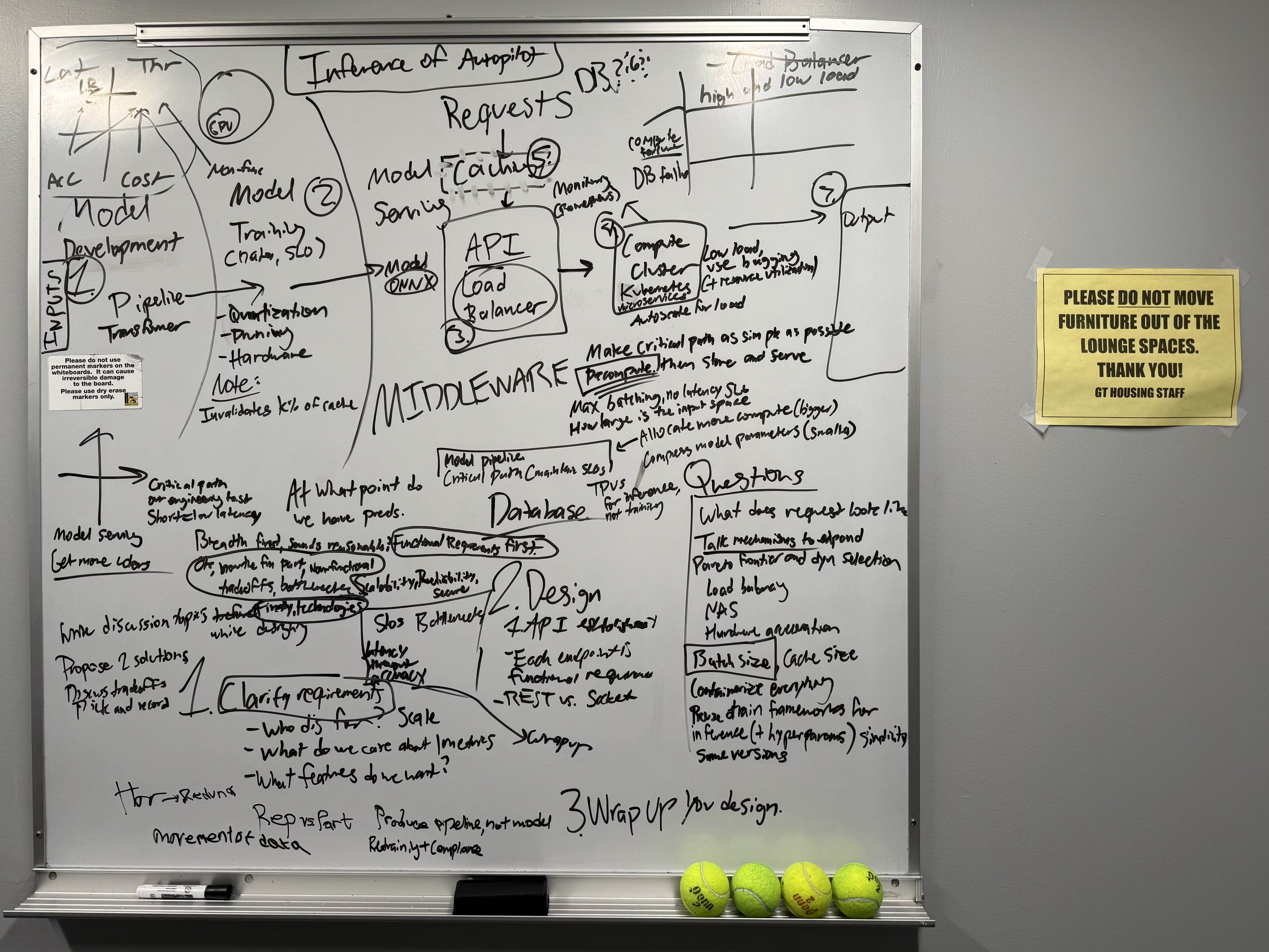
Algorithmic Monism
Plus, A labor-market approach to inference scheduling in soft-real-time
The Tradeoffs of Compression
Plus, why we'll never declaw intelligence due to Moore’s law